高分辨率
我们提供24兆像素的AVT-RGB成像色度计配合多种视场角的镜头可以覆盖各种应用场景。
配套镜头
成像色度计有一系列的镜头来配合探测器的的分辨率和尺寸,提供最清晰的图像。标准镜头的视场角可以涵盖到12°到55°,另外我们也提供显微镜头及NED镜头。
出众的传感器
使用索尼最新的Pregius CMOS传感器,测量比以前的CCD更快、更精确、更灵敏。
高动态范围
噪声的降低及满阱容量的提升,使得单次曝光测量就可以得到更大的动态亮度值范围(>70dB)。使用HDR成像方式可以获得高达100万:1的动态范围。
紧凑小巧
相机本身重量只有430g,使其便于固定,节约成本。小巧的封装也使其可以安装在狭小的空间中,节省出更多的空间用于产品的测试。
低功率(< 4.5 w)
极低的功率消耗,仪器在使用时不会过度发热。较低的操作温度消除了对Peltier 冷却器和风扇的需要。高效的设计带来了更低的重量、更低的成本和更好的可靠性。
速度
滤片式色度计需要旋转三刺激值滤片多次拍照,通常需要4个滤片4张图片叠加,为提高精度甚至更多。如果为了提高拟合精度,单个滤片的层数增多通过透过率下降,曝光时间增长,测试速度下降。RGB相机不需要旋转滤片,一次拍照完成测试,曝光时间变短,进一步提高测试速度。测试速度相比滤片色度计至少提高10倍。
彩色相机做成像色度计
彩色相机测试亮度色度具有速度快、成本低的优势,驱动很多用户进行尝试。但很少得到满意的效果。首先没有进行完整的成像色度计校准流程。包含:暗噪声校准、平场校准、线性校准、绝对值校准;而且关联不同的曝光时间、光圈、工作距离更为复杂。没有进行系统的校准工作,很难得到准确的数值。
其次由于彩色相机的RGB三刺激值的光谱响应与XYZ三刺激值的光谱响应相差较大,导致RGB转换XYZ的数值会产生很大偏差。基于单一光源的校准不能适用其他颜色发光体的测量。
我们C系列成像色度计对相机进行了完整的系统校准,完成了彩色相机到成像色度计的转变。无须考虑暗噪声、视场位置、线性、曝光时间、光圈及工作距离的影响。
精度
虽然RGB转换XYZ的数值有较大误差,就不能应用了吗?从大量应用端的精度要求及已经采用的彩色相机进行色度测量的场景看,只要合理考虑应用端的特点和要求,就完全可以使用。缺点是需要专业人员做准备工作,而不是直接使用。但鉴于速度和成本完全值得。
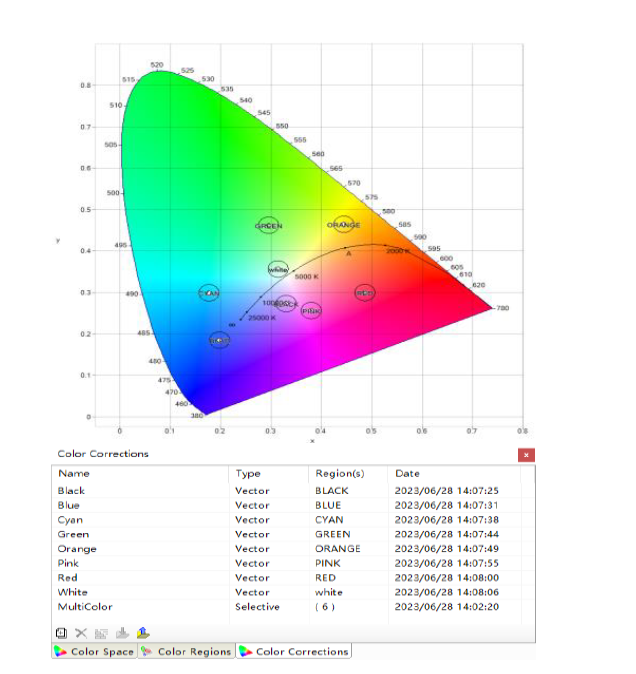
主要方法:
1.单一颜色校准。针对产线单一颜色测量可以提前预设校准系数。
2.多色域颜色校准。同时对多种颜色进行校准,测量时自动对预设的色域的颜色进行校准。
3.四色矩阵校准。经典混色校准方法,也是使用最多方法,适用于产线显示屏测量。
4.多阶矩阵校准(客制化)。7阶矩阵的校准后色度测试精度可以降至0.003。
5.实时校准。可以使用高精度点式快速分光辐射度计或高精度点式滤片色度计进行实时校准。
软件可开发性
针对产线需求,基于Photometrica的软件开发包,允许自定义脚本,也可以使用Python, LabVIEW, MATLAB, C#, C++等与其他设备进行通信。该开发包调用简单,可以通过很少的代码实现相机拍照、数据分析及提取。
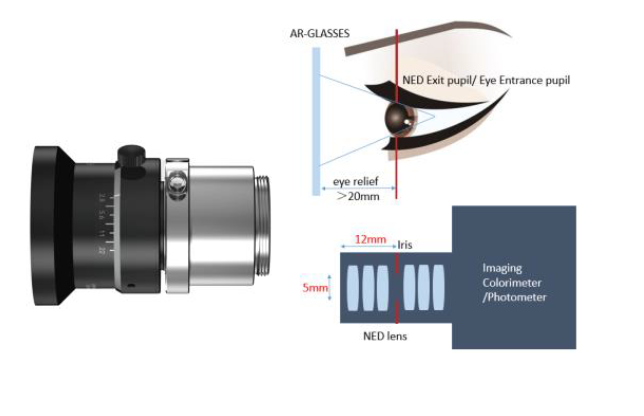
可选经济的NED镜头
此镜头入瞳孔径5mm, 匹配人眼。入瞳距离12mm, 虽不是前置光阑,但一般AR/VR眼镜大于20mm的出瞳距离(Eye relief),可将相机入瞳位置置于AR/VR眼镜的出瞳位置,大幅节省成本